Em uma faixa sombria do Deserto do Colorado, no sul da Califórnia, um rover compacto de quatro rodas recentemente percorreu cerca de 16 milhas (26 quilômetros), com pouca intervenção da equipe de engenheiros que o acompanhava. Chamado ERNEST (Exploration Rover for Navigating Extreme Sloped Terrain, Rover de Exploração para Navegar Terrenos Inclinados Extremos), este protótipo está sendo usado pela NASA para avançar tanto a autonomia robótica quanto a capacidade de atravessar paisagens desafiadoras.
Desenvolvido no Laboratório de Propulsão a Jato da NASA (Jet Propulsion Laboratory, JPL), no sul da Califórnia, o ERNEST tem 4 pés (1,2 metro) de comprimento. Ele não apenas consegue erguer cada uma de suas rodas de malha para passar por obstáculos que travariam os rovers marcianos Curiosity e Perseverance — da NASA, que têm seis rodas — como também recebeu capacidades aprimoradas de tomada de decisão independente. Esses avanços em mobilidade e autonomia poderiam ser incorporados em missões futuras que alcancem áreas antes inacessíveis de Marte ou da Lua.
Em campo, o ERNEST funcionou como uma plataforma de testes para uma possível missão lunar futura que exigiria velocidades maiores e uma quilometragem muito superior à que os rovers atuais conseguem atingir. Essa tecnologia pode ser usada para orientar projetos futuros de esforços de exploração na Lua e além.
“Esses testes estão nos ajudando a refinar o hardware de mobilidade e o software de autonomia para navegar distâncias extremas em uma ampla variedade de condições de terreno e iluminação esperadas na Lua”, disse Issa Nesnas, principal tecnólogo do JPL, que liderou os testes recentes como chefe de autonomia de um conceito de missão da NASA para um possível rover lunar de longo alcance.

Engenheiros do JPL instalaram iluminadores após transportar o ERNEST para um teste antes do nascer do sol durante uma campanha de campo no deserto de sete dias.
NASA/JPL-Caltech
O time de Nesnas está usando o ERNEST para demonstrar que é possível construir um rover com o dobro do tamanho do protótipo e capaz de uma missão lunar de longa distância. Durante a campanha recente, o ERNEST percorreu velocidades de até 0,6 mph (1 kph) por 37 horas de condução, ao longo de sete dias de testes intermitentes. Isso equivale a uma ordem de magnitude acima da velocidade máxima que Perseverance e Curiosity conseguem navegar.
“Você poderia fazer uma viagem de exploração científica pela estrada na Lua — ou em Marte — com este veículo”, disse James Keane, cientista planetário do JPL que trabalha em missões lunares.
O objetivo inicial do time que desenvolveu o ERNEST era mecânico: projetar um rover relativamente simples e de baixo custo que avance o sistema de suspensão rocker-bogie (balancim-bogie) confiável, presente em todos os rovers marcianos desde o NASA Sojourner. Esse sistema passivo mantém um peso relativamente constante em todas as seis rodas, graças a pontos de pivô e hastes (struts) que permitem que cada roda se adapte à superfície em mudança.
No ERNEST, a suspensão ativa permite que o rover gerencie a distribuição de peso entre suas rodas. Dois conjuntos articulados motorizados na parte dianteira acionam um gimbal que permite que o rover dirija usando diferentes andares (gaits), como “squirming” (movimento de escorregamento), “wheel-walking” (caminhada sobre rodas) e escalada de obstáculos. Com um mecanismo de embreagem, ele pode alternar entre suspensão ativa e passiva, sendo a passiva menos capaz em termos de terreno, mas mais eficiente em energia. Com quatro rodas direcionáveis, ele pode se deslocar em qualquer direção, inclusive de lado.
“Começamos supondo que poderíamos fazer melhor ao projetar um sistema robótico de mobilidade para superfícies planetárias”, disse Hari Nayar, principal tecnólogo do JPL que lidera a equipe do ERNEST. “Embora o sistema rocker-bogie tenha sido muito bem-sucedido nos últimos 30 anos, houve muita pesquisa nesse período sobre mobilidade e sobre a compreensão da interação com o terreno.”
Antes de chegar à versão atual do ERNEST, a equipe construiu dois protótipos anteriores, cada um com cerca de 2 pés (0,6 metro) de comprimento, para testar 11 configurações de suspensão ativa. Em um reboque preenchido com simulante de regolito lunar, eles realizaram experimentos com diferentes ângulos de inclinação ao longo de vários meses antes de aterrissar em um projeto final.
Depois, a equipe ampliou o sistema, incluindo a adição de uma cabeça retangular montada em um mastro de 4,5 pés (1,4 metro). O hardware foi concluído em setembro de 2024, mas o rover ainda precisava de um operador humano para controlá-lo com um joystick, enviando comandos para instruir o rover sobre como se mover sobre obstáculos.
Para treinar o rover a pensar por conta própria, a equipe do ERNEST recorreu ao aprendizado por reforço (reinforcement learning), um tipo de inteligência artificial em que o robô aprende interagindo com seu ambiente. O Laboratório de Dinâmica e Simulação em Tempo Real (Dynamics and Real-Time Simulation Laboratory) do JPL desenvolveu um ambiente virtual de testes com alta fidelidade que replica o comportamento do rover. A equipe forneceu ao simulador os dados coletados por engenheiros que documentaram a resposta do hardware real do rover a diversos tipos de terreno. Em um cluster de computação de alto desempenho, a equipe executou muitas simulações ao mesmo tempo, às vezes concluindo milhares de horas de testes em um único fim de semana.
Após meses de treinamento virtual, a equipe do ERNEST estava pronta para ver se o rover conseguiria usar seus novos algoritmos autônomos para descobrir como atravessar características do terreno que parariam um rover com suspensão passiva. Eles montaram um circuito de obstáculos com ondulações de areia, montes de detritos, degraus e encostas íngremes no Mars Yard do JPL, um campo de testes externo de terreno. Em seguida, observaram o rover manobrar o terreno por conta própria. Desde então, o ERNEST concluiu muitos circuitos desse tipo.
O time de Nayar está iniciando um novo projeto de autonomia que envolve integrar a capacidade do rover de determinar quando e como usar sua suspensão ativa com navegação inteligente de maior alcance. O objetivo é permitir que o ERNEST planeje um caminho eficiente para enfrentar obstáculos transponíveis e contornar os perigosos. Essas capacidades podem contribuir para possíveis missões futuras de rovers que enfrentem paisagens difíceis em Marte ou áreas mais acidentadas da Lua.
O trabalho no ERNEST começou em 2022 e foi inicialmente apoiado por recursos internos de pesquisa e desenvolvimento do JPL. Atualmente, o projeto é financiado pelo Mars Exploration Program da NASA e pelo Exploration Science Strategy and Integration Office (Escritório de Estratégia e Integração da Ciência de Exploração) na Science Mission Directorate (Diretoria de Missões Científicas) da NASA, na sede em Washington. A Caltech, em Pasadena, Califórnia, gerencia o JPL para a NASA.
Contatos de mídia
Karen Fox / Molly Wasser NASA Headquarters, Washington 240-285-5155 / 240-419-1732
karen.c.fox@nasa.gov / molly.l.wasser@nasa.gov
Melissa Pamer Jet Propulsion Laboratory, Pasadena, Calif. 626-314-4928
melissa.pamer@jpl.nasa.gov
2026-040
Explore Mais
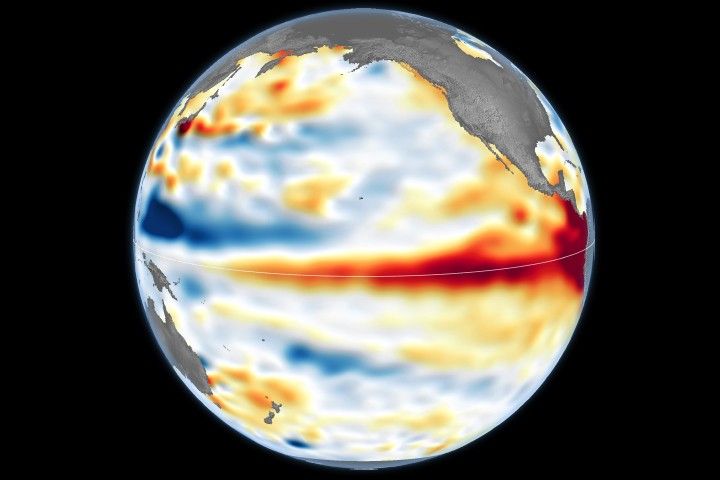
El Niño Está em Andamento
As observações por satélite da altura da superfície do mar indicaram que o evento de 2026 continuou a se fortalecer em…
20 horas atrás
O Quantum Lab da NASA a Bordo da Estação Espacial Ganha Upgrade Mais Frio
2 dias atrás

Explore JPL Acontecerá em 10 e 11 de Outubro
3 dias atrás