Escrito por Susanne P. Schwenzer, Professora de Mineralogia Planetária na Open University, Reino Unido
Data de planejamento da Terra: sexta-feira, 3 de abril de 2026
Eu fui a líder da equipe de ciência da geologia na segunda-feira para o planejamento dos Sols 4852-4853, quando nossos dados não chegaram a tempo para o planejamento. Assim, nos tornamos criativos como equipe, pensando no que poderíamos fazer, sem saber exatamente onde nosso rover poderia estar. E para isso, primeiro pensamos no AEGIS, a capacidade do rover de encontrar um alvo para medições de ChemCam LIBS por conta própria.
Normalmente usamos essa capacidade após os deslocamentos, antes de termos visto os dados aqui na Terra, para obter uma medição extra de LIBS. Desta vez, colocamos duas dessas observações no plano e adicionamos muitas observações atmosféricas e ambientais, como filmes de redemoinhos de poeira. É uma sessão de planejamento interessante que sempre faz a equipe conversar mais do que o normal, porque não há rotinas para esses dias! Eu acho isso ao mesmo tempo tenso e gratificante. Qualquer coisa que não seja exatamente como esperado adiciona níveis de complexidade que exigem mais foco e mais reflexão, tornando-me tensa. Mas também é realmente bom quando conseguimos tirar o melhor proveito desses dias. Meus colegas também parecem ter muita energia e são especialmente solidários uns com os outros. Dito isso, como todos os outros, eu prefiro os dias de rotina onde tudo dá certo e focamos na ciência.
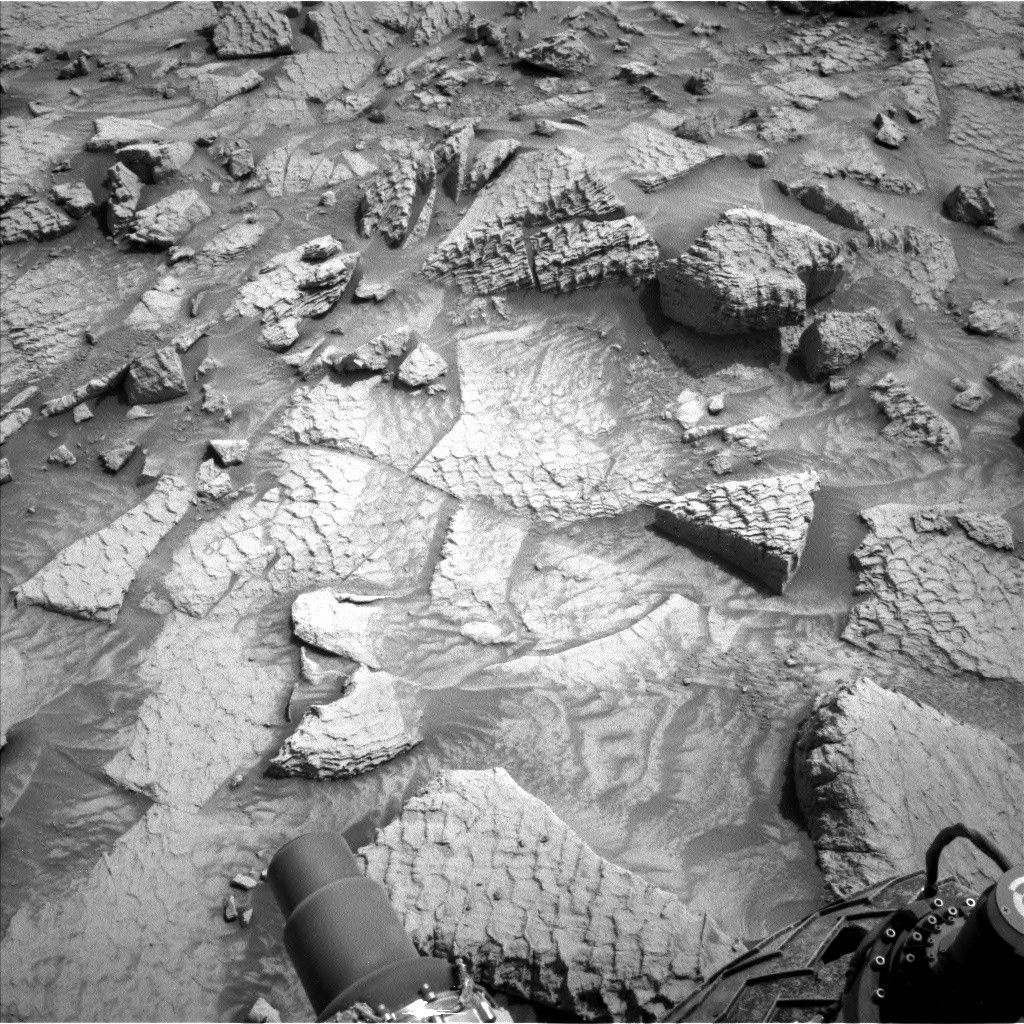
Todos os nossos dados chegaram perfeitamente a tempo para o planejamento na quarta-feira e nos encontramos em um terreno com muitos blocos que têm polígonos em sua superfície superior. Confira as imagens , é um terreno selvagem que me lembrou alguns terrenos ricos em rochas que vimos de volta nas margens do Canal Gediz Vallis. É interessante ver a distribuição dos blocos, e estou curiosa para saber como eles podem mudar ao longo da travessia até o Monte Sharp. Por enquanto, temos uma atividade que chamamos de “calçada MARDI” no plano. Isso significa que a câmera MARDI tira imagens enquanto o rover está dirigindo, no Sol 4855. Essas sequências de imagens fornecem grandes insights sobre terrenos em mudança, e estamos ansiosos para que os dados cheguem até nós!
Ao longo da semana, o ChemCam fez três observações AEGIS e quatro observações apontadas por humanos nos alvos “Las Petas,” “Punta Negra,” “Pampa del Molle,” e “Los Condores.” Estávamos tentando medir a rocha de fundo que parece normal e todas as diferentes características, algumas das quais você pode ver na imagem acima. Queremos descobrir quais são os materiais mais elevados que formam esses polígonos proeminentes. O APXS está obtendo quatro alvos no plano, também observando a diversidade das rochas. Estes são chamados de “Rio Espiritu Santo,” “La Escalera,” “Los Condores,” e “Tropico de Capricornio.” Tudo se concentra em entender o que forma os polígonos, porque qualquer diferença na química pode nos dizer muito sobre o que aconteceu e como os polígonos se formaram. Por extensão, isso permitirá que a equipe deduza as condições ambientais na época em que os polígonos se formaram.
Como você pode imaginar, a imagem é muito importante em uma paisagem tão variada quanto esta! A Mastcam está olhando em muitas direções no campo próximo e mais adiante na estrada — nosso caminho de deslocamento projetado. Além disso, o ChemCam está tirando imagens de longa distância com seu Imager Micro Remoto (RMI) para ter uma visão mais próxima das paredes ao nosso redor. O monte chamado “Mishe Mokwa” ainda é um dos favoritos do RMI e da Mastcam porque nos dá muitos insights sobre sua estrutura enquanto estamos passando e também um pouco ao redor dele.
Observações atmosféricas e ambientais ocorrem em todos os planos e incluem medições de opacidade atmosférica, buscas por redemoinhos de poeira e, no plano de sexta-feira, também uma medição atmosférica do APXS. O instrumento DAN está monitorando água no subsolo em todos os planos. Portanto, são três planos completos, apesar da pequena espera extra pelos dados!
E enquanto estou escrevendo isso, quatro astronautas na cápsula Orion estão a caminho de contornar a Lua. Estou muito animada! Quando a Apollo 8 foi a primeira missão a voar ao redor da Lua em dezembro de 1968, eu ainda não havia nascido. Na verdade, cheguei alguns meses depois que a Apollo 11 pousou na Lua pela primeira vez. Agora, poder testemunhar essas missões lunares pessoalmente, ouvir as vozes entre a espaçonave Integrity e a sala de controle em Houston, e ver as imagens conforme chegam... magnífico! Vá, Artemis II!
Rover Curiosity da NASA na base do Monte Sharp
NASA/JPL-Caltech/MSSS

Compartilhar
Detalhes
Última Atualização
13 de abril de 2026
Termos Relacionados
Blogs