Por Susanne P. Schwenzer, Professora de Mineralogia Planetária na The Open University, Reino Unido
Data de planejamento da Terra: quinta-feira, 18 de junho de 2026
Na região em que o Curiosity está explorando atualmente, a equipe de ciência mapeou várias áreas com texturas de superfície com aparência diferente nas imagens orbitais. Se você quiser ver por conta própria o que há para observar, confira o mapa “Where is Curiosity?”.
Você vai encontrar diferentes tons de laranja e bege, além de texturas com aparência mais áspera e mais lisa. É isso que os geomorfologistas da nossa equipe usam para mapear as áreas para exploração pelo rover. É claro que depois complementamos tudo isso com imagens feitas em solo, incluindo o exclusivo “drive direction imaging” (imageamento da direção do deslocamento), que é obtido após cada deslocamento pela Mast Camera. O planejamento do percurso é feito usando uma combinação de todas essas informações. Então não deveria haver surpresas, certo?
Na segunda-feira, a equipe planejou três sols em preparação para um planejamento de quinta-feira, para levar em conta o fim de semana de feriado federal nos EUA. O espaço de trabalho acabou ficando um pouco “espinhoso”, então não conseguimos encontrar uma área em que fosse possível fazer o DRT. A APXS ainda encontrou um bom alvo em rocha de embasamento, “Rio Baker”, que também tinha documentação MAHLI. Além disso, a ChemCam investigou “Rica Aventura”, uma rocha de embasamento texturizada, e “Tabebuia”, um bloco individual com aparência mais escura, usando seu LIBS, e realizou uma observação espectral passiva em um segundo bloco escuro flutuante chamado “Lago Ranco”. É claro que a equipe também queria observar à distância com a ChemCam por imageamento remoto, estendendo nossa investigação do afloramento-base da Cordillera.
A obtenção de imagens está sempre no topo da lista. No plano de segunda-feira, a Mastcam está analisando as dunas modernas com o mosaico “Tacaza”, e, com mais mosaicos voltados para as áreas de estacionamento futuras — algumas das quais pareciam bem lisas a partir daquele ponto de vista —, continuamos também as observações ambientais e atmosféricas em busca de redemoinhos de poeira, da opacidade da atmosfera e do monitoramento da pressão e da temperatura. Depois de tudo isso, o rover percorreu cerca de 35 metros (aproximadamente 115 pés) até uma área que parecia bem lisa em todas as imagens disponíveis naquele momento. Então esperávamos um bom local para implantar o DRT, mas não achávamos que poderíamos ter uma surpresa.
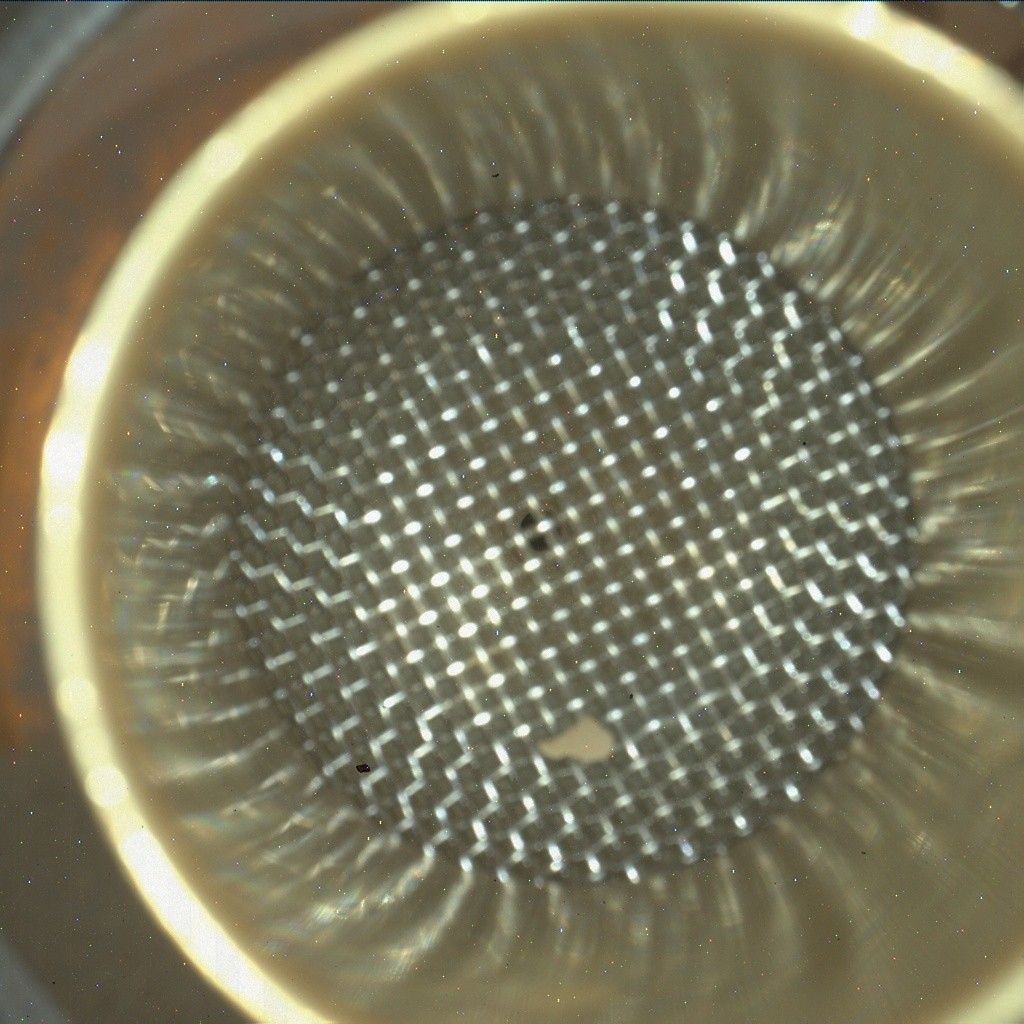
O deslocamento terminou exatamente como planejado, bem no meio daquela área — vista de longe — com aparência lisa. Mas, quando abrimos as imagens pós-deslocamento na manhã de quinta-feira, todos nós reagimos com muita surpresa. De perto, o local de estacionamento parece ser tudo menos liso. Você pode ver a surpresa na imagem de título deste blog. Há polígonos, veios, laminação e provavelmente mais, assim que inspecionarmos as imagens de maior resolução obtidas hoje. “Maior resolução” é a chave para o fato de termos passado por uma surpresa tão grande! As feições são bem pequenas, com alguns centímetros de diâmetro, e por isso não foi possível vê-las nas imagens orbitais nem, de longe, nas imagens de navegação e da mast camera. A resolução da câmera a partir da distância simplesmente não é suficiente para enxergá-las. Mas, de perto, o terreno revelou toda a sua beleza! E tenho certeza de que haverá ainda mais detalhes nas imagens do MAHLI e do imager RMI da ChemCam, com resolução ainda maior, obtidas hoje.
Então, o que planejamos depois de recuperar o fôlego na quinta-feira? Primeiro, você já adivinhou: imagens, imagens e mais imagens. A Mastcam faz um panorama completo com seu “olho esquerdo” e adiciona uma série de mosaicos mais aproximados com seu “olho direito” de maior resolução. Além disso, há uma imagem do ChemCam Remote Micro Imager para documentar estruturas mais ao longe com alta resolução. A ChemCam está investigando três alvos usando LIBS: “Rio Chimore” é uma faixa com tom mais claro; você também pode ver algumas dessas feições na imagem de capa deste blog. Os outros dois alvos do LIBS são “Rio de Lava”, um alvo de veios, e “Rio de Salta”, um dos polígonos. A APXS também está observando a rocha de embasamento e as cristas, nos alvos “Pampa Grande” e “Iquique Ridge”. O MAHLI está fazendo o acima mencionado “aspecto de lente de mão” bem de perto. Vamos ver o que descobriremos quando recebermos essas imagens.
Por fim, o Curiosity subiu a colina ao longo de um terreno com aparência muito lisa, que está repleto de polígonos minúsculos. Vamos ver se estamos diante de mais uma surpresa reverberando por todos os nossos escritórios — e atravessando dois continentes, já que tive a boa sorte de estar entre os primeiros a ver isso aqui na Inglaterra (ou talvez fossem nossos colegas franceses da ChemCam, que estão em um fuso horário uma hora à frente do meu?). Seja qual for o caso, esse terreno tem muito a dizer sobre a história geológica de Marte!
Quer ler mais posts da equipe do Curiosity?
Visite Mission Updates
Quer saber mais sobre os instrumentos científicos do Curiosity?
Visite a página Science Instruments
---BLOCO---
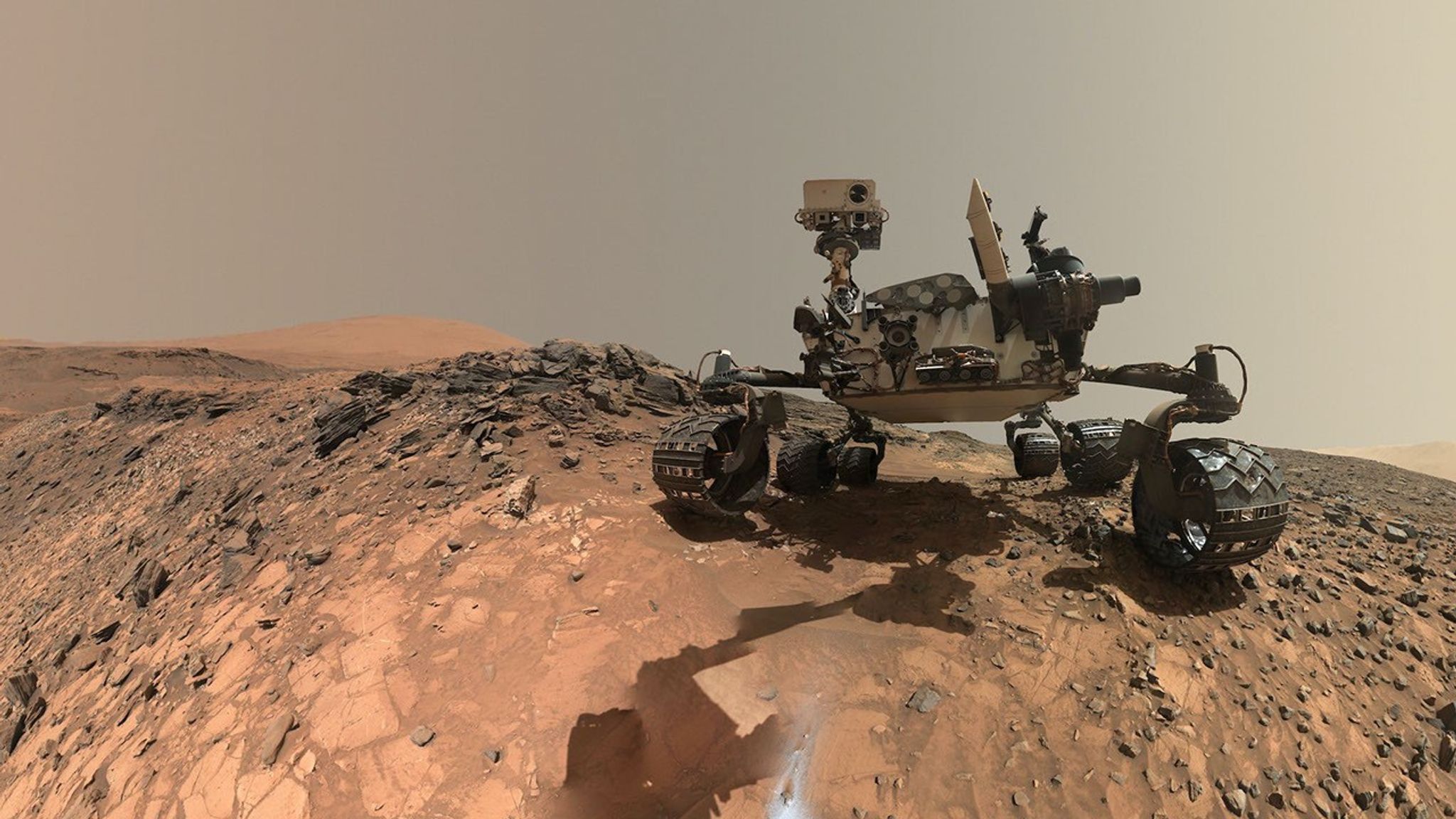
Rover Curiosity da NASA na base do Monte Sharp
NASA/JPL-Caltech/MSSS
Compartilhar
Detalhes
Última atualização
24 de junho de 2026
Termos relacionados
Blogs
Explore mais
---BLOCO---
Curiosity Blog, Sols 4920-4926: Surveying the Bands
5 dias atrás
---BLOCO---
Curiosity Blog: Sols 4913-4919: Planetary Explorers, Freewheeling to the Yardang Unit!
2 semanas atrás
---BLOCO---
Curiosity Blog, Sols 4908-4912: Goodbye Campo Marte, It’s Been Fun!
3 semanas atrás
[Referência terminológica: orbit=órbita, mission=missão, planet=planeta, atmosphere=atmosfera, rover=rover, orbital=orbital]