Um grupo de estudantes da Universidade Cornell está chamando a atenção da indústria e do governo federal com os resultados de sua pesquisa sobre como criar um sistema nacional de gerenciamento do tráfego aéreo no qual milhares de drones poderiam operar com segurança em conjunto.
A NASA está patrocinando esse trabalho por meio do University Student Research Challenge (USRC), que oferece bolsas a estudantes universitários interessados em ajudar a agência a concretizar seus objetivos de pesquisa aeronáutica.
“Olhar para novos sistemas de gerenciamento de tráfego para drones não é algo novo”, disse Mehrnaz Sabet, estudante de doutorado na área de ciência da informação e pesquisadora principal do projeto, além de liderar a equipe da Cornell. “Na verdade, a NASA lidera esse esforço há anos.”
Agora, por meio do USRC, a NASA dá a Sabet e sua equipe a oportunidade de propor abordagens inovadoras para a segurança de drones, gerenciando seus movimentos no ar, aproveitando mentes jovens e ideias frescas.
O benefício final da pesquisa da Cornell nessa área é a plena realização da advanced air mobility, uma área de foco da indústria que inclui desde táxis aéreos urbanos, aeronaves mais robustas para resposta a desastres e pizza recém-saída do forno entregue bem na sua porta.
O trabalho também destaca o valor que a NASA atribui ao amadurecimento de tecnologias de ponta e ao desenvolvimento de sua futura força de trabalho por meio de iniciativas como o USRC.
“Sabet e sua equipe demonstraram habilidades versáteis envolvendo desenvolvimento de software, algoritmos, hardware, sensores, testes em laboratório, simulações e testes de voo reais — uma combinação rara”, disse Parimal Koperdekar, diretor interino do Airspace Operations and Safety Program da NASA.
Voar drones como se dirige
Atualmente, operadores de drones precisam enviar planos que descrevem totalmente a trajetória pretendida do drone para um serviço de gerenciamento de tráfego. Esses planos são verificados com os de outras aeronaves para garantir que não haverá colisões — o que Sabet chama de desconflicção estratégica.
O desafio é que, hoje, o sistema de gerenciamento do tráfego aéreo tem capacidade limitada para lidar com o número crescente de aeronaves que decolam. Adicionar milhares de drones à mistura nos próximos anos pode sobrecarregar o sistema, disse Sabet.
O que é necessário no ar é, essencialmente, o que temos no chão — onde milhões de pessoas dirigem em uma estrada todos os dias, afirmou ela.
Como motorista, você pode conhecer toda a sua “trajetória”, ou o caminho que seguirá para chegar ao destino. Mas você nunca coordenaria seu plano com todos os outros motoristas na estrada antes de sair. Em vez disso, leis de trânsito e infraestrutura, como semáforos e placas de trânsito, permitem que você se desconflicte dos outros carros à medida que avança.
Os operadores de drones ainda precisarão enviar planos de voo dizendo para onde pretendem ir, mas a ideia é incorporar essa flexibilidade “como a de um carro” aos sistemas de operação dos drones, permitindo que eles sejam adaptáveis durante suas jornadas.
“Precisamos garantir que esses diferentes tipos de drones consigam se desconflictar taticamente entre si, de modo que seja seguro operarem como os carros fazem no solo. E essa peça que falta — desconflicção tática — está no centro do nosso projeto”, disse Sabet.
---BLOCO---
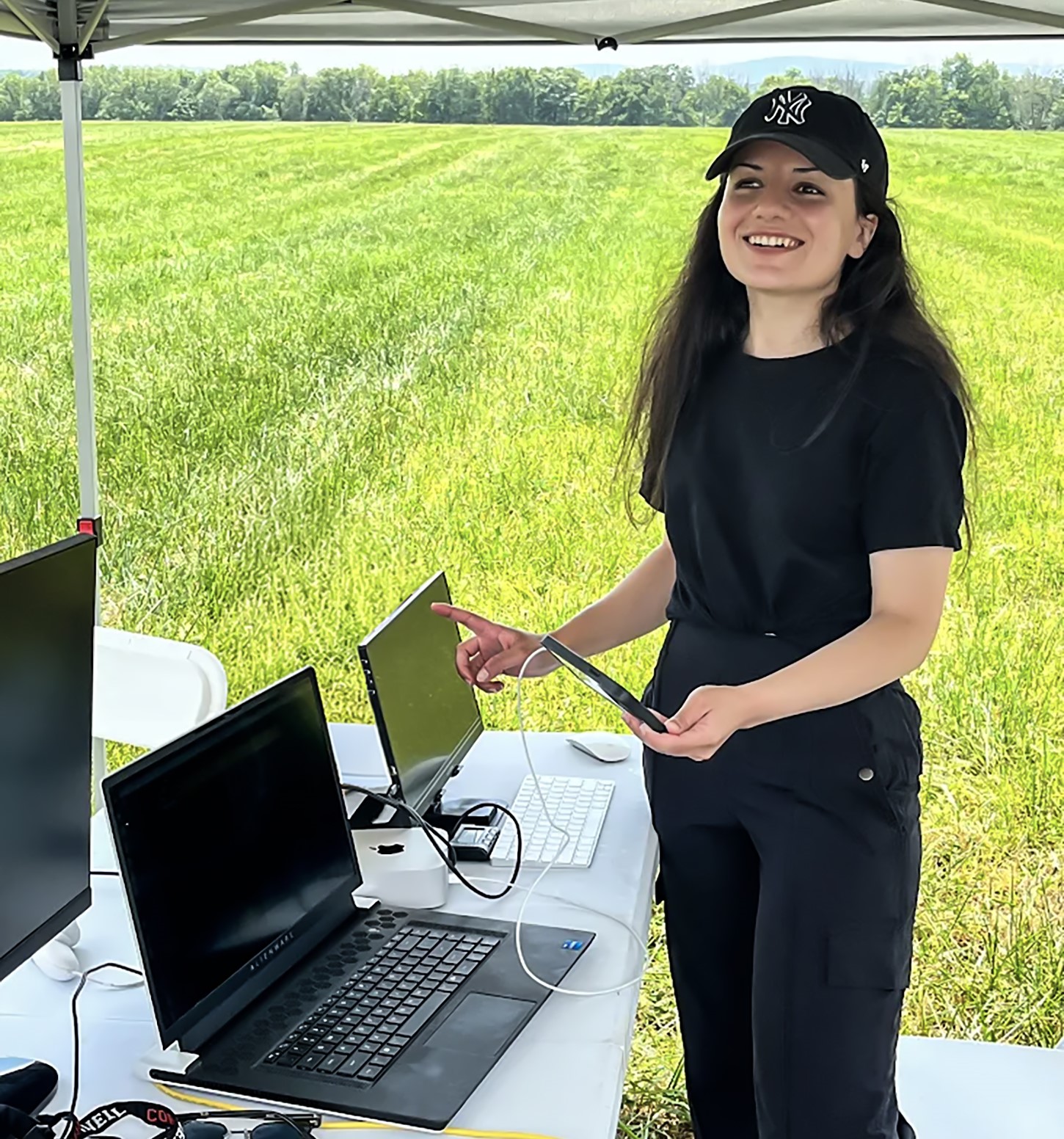
Mehrnaz Sabet, candidata ao doutorado na área de ciência da informação da Universidade Cornell, lidera uma equipe de estudantes testando tecnologias usadas em um sistema de gerenciamento de tráfego de drones com um subsídio do University Student Research Challenge da NASA. Ela é vista durante um exercício de simulação de tráfego de drones realizado em um campo rural.
Universidade Cornell
Dois mundos unidos
A chave da pesquisa da equipe da Cornell é a noção de integrar um mundo simulado ao mundo real para testar e demonstrar como os drones podem aprender a se adaptar a condições potencialmente perigosas e fazer correções necessárias em seu trajeto de voo por conta própria.
Sabendo que não poderiam sair e voar 100 drones ao mesmo tempo para testar suas ideias de desconflicção tática, os estudantes decidiram criar um mundo urbano totalmente virtual para avaliar diferentes modelos de tráfego de alta densidade, algoritmos de separação e dados relacionados.
“O primeiro ano do projeto foi dedicado a adaptar e dimensionar esse motor de simulação, e tudo correu muito bem”, disse Sabet. “Mas não queríamos ficar apenas na simulação. Queríamos ver como a simulação se traduzia para o mundo real, o que importava mais.”
Ainda limitados pela quantidade de drones que podiam operar e por onde podiam voar — não eram muitos e, basicamente, no meio do nada — eles buscaram o melhor dos dois mundos, o real e o imaginado.
“O que acabamos fazendo foi incorporar a simulação em um drone real, de modo que o drone achasse que estava voando em um ambiente urbano denso, embora na verdade estivesse voando em um campo aberto, sem nenhuma cidade real à vista”, disse Sabet.
---BLOCO---
antes
depois
---BLOCO---
Um drone projetado e construído por estudantes da Universidade Cornell paira sobre um campo aberto durante um teste de tecnologias de gerenciamento do tráfego aéreo, no qual o drone “acha” que está voando dentro de um ambiente urbano. O objetivo é provar um sistema em que drones possam reagir com segurança a eventos inesperados e evitar uns aos outros no céu sem intervenção humana.
Universidade Cornell
---BLOCO---
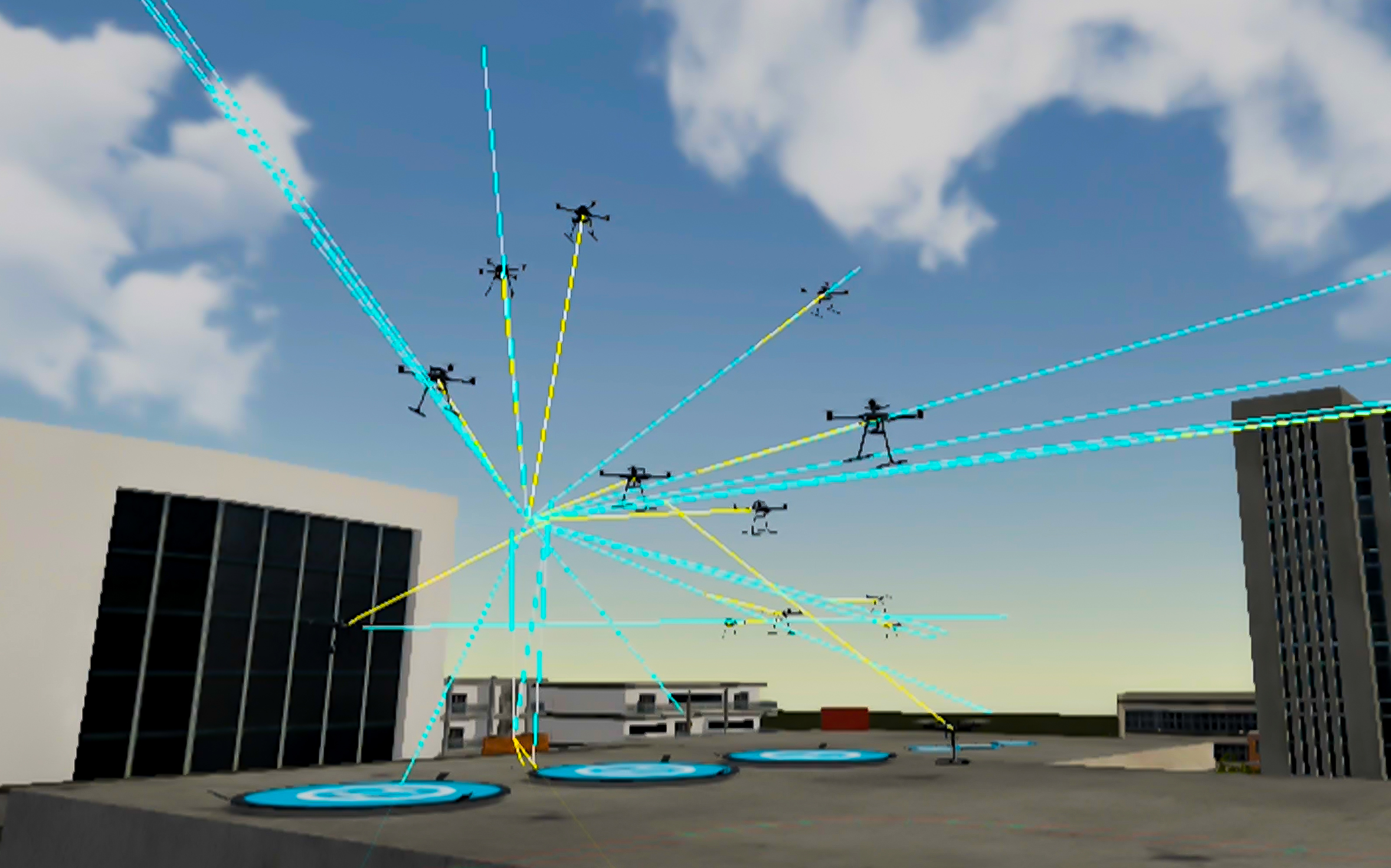
Vários drones aparecem em uma simulação gráfica por computador da Universidade Cornell de um ambiente urbano, na qual um sistema de gerenciamento do tráfego aéreo é testado para mostrar como os drones podem alterar o curso com segurança por conta própria para evitar colisões.
Universidade Cornell
antes
depois
---BLOCO---
Um drone projetado e construído por estudantes da Universidade Cornell paira sobre um campo aberto durante um teste de tecnologias de gerenciamento do tráfego aéreo, no qual o drone “acha” que está voando dentro de um ambiente urbano. O objetivo é provar um sistema em que drones possam reagir com segurança a eventos inesperados e evitar uns aos outros no céu sem intervenção humana.
Universidade Cornell
---BLOCO---
Vários drones aparecem em uma simulação gráfica por computador da Universidade Cornell de um ambiente urbano, na qual um sistema de gerenciamento do tráfego aéreo é testado para mostrar como os drones podem alterar o curso com segurança por conta própria para evitar colisões.
Universidade Cornell
voo de drone
combinando mundos reais e simulados
CurtainToggle2-Up
Detalhes da imagem
A imagem à esquerda (ANTES) mostra um drone projetado e construído por estudantes da Universidade Cornell voando no campo aberto acima de um campo rural isolado. A imagem à direita (DEPOIS) mostra o ambiente urbano simulado no qual o drone real “acha” que está voando ao calcular todas as trajetórias de voo imaginárias dos drones (as linhas azuis e amarelas) para encontrar a melhor trajetória e evitar uma colisão com segurança. Essa combinação de mundos reais e simulados permite que o drone teste com segurança suas tecnologias de desvio de tráfego.
---BLOCO---
Lições do mundo real
Isso permitiu que a equipe testasse diferentes ferramentas de gerenciamento de tráfego e avaliasse como os drones poderiam coordenar correções de rota e evitar colisões entre si.
No ano passado, eles levaram a ideia adiante ao voar dois drones reais no mundo real, com cada um executando a simulação em tempo real a bordo. Isso permitiu que eles coordenassem e “enxergassem” tanto o tráfego simulado quanto um ao outro dentro do ambiente de teste integrado.
“Então, nós os colocaríamos intencionalmente em rota de colisão direta para fazer um teste de estresse dos modelos de detecção e desvio e de coordenação, e ver o quão bem eles reagem e coordenam as manobras do drone para evitar bater um no outro”, disse Sabet.
O sucesso deles chamou a atenção de especialistas da NASA em Unmanned Aircraft Systems Traffic Management (UTM).
“O que impressiona é que o estudo da Cornell incluiu mais de 10.000 execuções envolvendo mais de um milhão de trajetórias, e mais de 200.000 horas de experimentos para entender como a coordenação descentralizada entre múltiplos agentes ocorreria com segurança”, disse Kopardekar.
A indústria e a Federal Aviation Administration também responderam positivamente a essa pesquisa e ao seu potencial. A equipe foi solicitada a usar sua infraestrutura e tecnologia para recriar virtualmente um incidente em 2025 no qual um par de drones colidiu com uma grua estacionária no Arizona. A equipe também mostrou como o acidente poderia ter sido evitado.
A equipe também foi solicitada a simular incêndios recentes no mundo real na Califórnia para demonstrar como os drones poderiam coordenar melhor seus movimentos, tanto para fornecer consciência situacional a autoridades de segurança pública no solo quanto para se manterem afastados de aeronaves-tanque de combate a incêndios.
E, de acordo com a equipe da Cornell, a FAA está interessada em aplicar a combinação de testes virtuais e do mundo real do projeto para avaliar operações com drones sob níveis crescentes de complexidade operacional.
“Esse tipo de complexidade operacional em realidade mista permite que eles testem operações com drones de um jeito que não era possível antes”, disse Sabet.
Graças ao apoio da